Integrating mSOUND with k-Wave for transducers of curved shape
This example shows how to integrate mSOUND with k-Wave for simulations involving curved transducers. Currently, only planar phased-arrays can be directly set up in mSOUND for modeling focused beams. To more accurately model a physically curved transducer, the user needs to first use k-Wave (or other software such as FOCUS, Field II, etc.) to propagate the wave field from the curved transducer for a small distance and record the pressure field on a plane. The recorded pressure field can be then used as the input to mSOUND to further propagate the sound. In this example, a 2D curved transducer is first modeled with k-Wave and then with mSOUND.
Defining the computational domain in k-Wave
Define the computational domain in the k-Wave calculation.
dx = 1.8750e-04; % step size in the x direction [m]
dy = 1.8750e-04; % step size in the y direction [m]
dt = 3.1250e-08; % time step size [s]
Nx = 240; % computational domain size in the x direction [grid points]
Ny = 50; % computational domain size in the y direction [grid points]
kgrid = kWaveGrid(Nx, dx, Ny, dy);
fc = 1.0e6; % fundamental frequency [Hz]
kgrid.t_array = 0:dt:40/fc; % time array [s]
Defining a curved transducer in k-Wave
In this example, a curved transducer is defined in k-Wave using the function makeCircle.
TR_radius = 0.0120; % transducer aperture radius [m]
TR_focus = 0.0150; % transducer focal length [m]
focus = round(TR_focus/dx); % transducer focal length [grid points]
cx = round(Nx/2); % x coordinate of the transducer center[grid points]
cy = 10 + focus; % y coordinate of the transducer center[grid points]
arc_angle1 = asin(TR_radius/TR_focus); % [radians]
arc_angle2 = pi*2; % [radians]
arc_angle3 = pi*2 - arc_angle1; % [radians]
circle1 = makeCircle(Nx, Ny, cx, cy, focus, arc_angle1, false);
circle2 = makeCircle(Nx, Ny, cx, cy, focus, arc_angle2, false);
circle3 = makeCircle(Nx, Ny, cx, cy, focus, arc_angle3, false);
circle = circle2 - circle3 + circle1;
source.p_mask = zeros(Nx, Ny);
source.p_mask = circle; % define source mask
sensor.mask = zeros(Nx, Ny);
sensor.mask(:, Ny/2+offcenter) = 1; % define sensor mask
Excitation signal
A four-cycle Gaussian-modulated pulse is used as the excitation signal.
source_mag = 1; % [Pa]
ts = [-num_cycles/fc:dt:num_cycles/fc]; % excitation pulse length
excit_p = sin(2*pi*fc*(ts)).*exp(-(ts).^2*fc^2/2); % excitation pulse
source.p = excit_p*source_mag;
input_args = {'DisplayMask', source.p_mask, 'DataCast', 'single'};
% run the simulation
sensor_data = kspaceFirstOrder2D(kgrid, medium, source, sensor, input_args{:});
% reshape the output data for further simulation
sensor_data = reshape(sensor_data, Nx, length(kgrid.t_array));
Implementing signals to the TMDM
Pressure recorded at the sensor positions from the k-Wave simulation will be used as the source pressure in mSOUND. It is noted that sensor data from k-Wave is indexed as [time, sensor_positions], while in mSOUND it is [sensor_positions, time]. If the time step or transverse spatial domain size in k-Wave is different from that in mSOUND, sensor_data from the k-Wave needs to be resized.
% defining the computational domain in mSOUND
x_length = kgrid.dx*kgrid.Nx;
y_length = TR_focus - kgrid.dy*(Ny-20);
t_length = max(kgrid.t_array);
dt = 6.2500e-08; % time step in mSOUND [s]
mgrid = set_grid(dt, t_length, dx, x_length, dy, y_length);
% resize the sensor data as a larger time step is applied in mSOUND
source_p = sensor_data(:, 1:2:end).';
% Define the medium properties in the TMDM
medium.c = 1500; % speed of sound [m/s]
medium.rho = 1000; % density [kg/m^3]
medium.beta = 0.0; % nonlinear coefficient
medium.ca = 0; % attenuation coefficient [dB/(MHz^y cm)]
medium.cb = 2.0; % power law exponent
medium.c0 = 1500; % reference speed of sound [m/s]
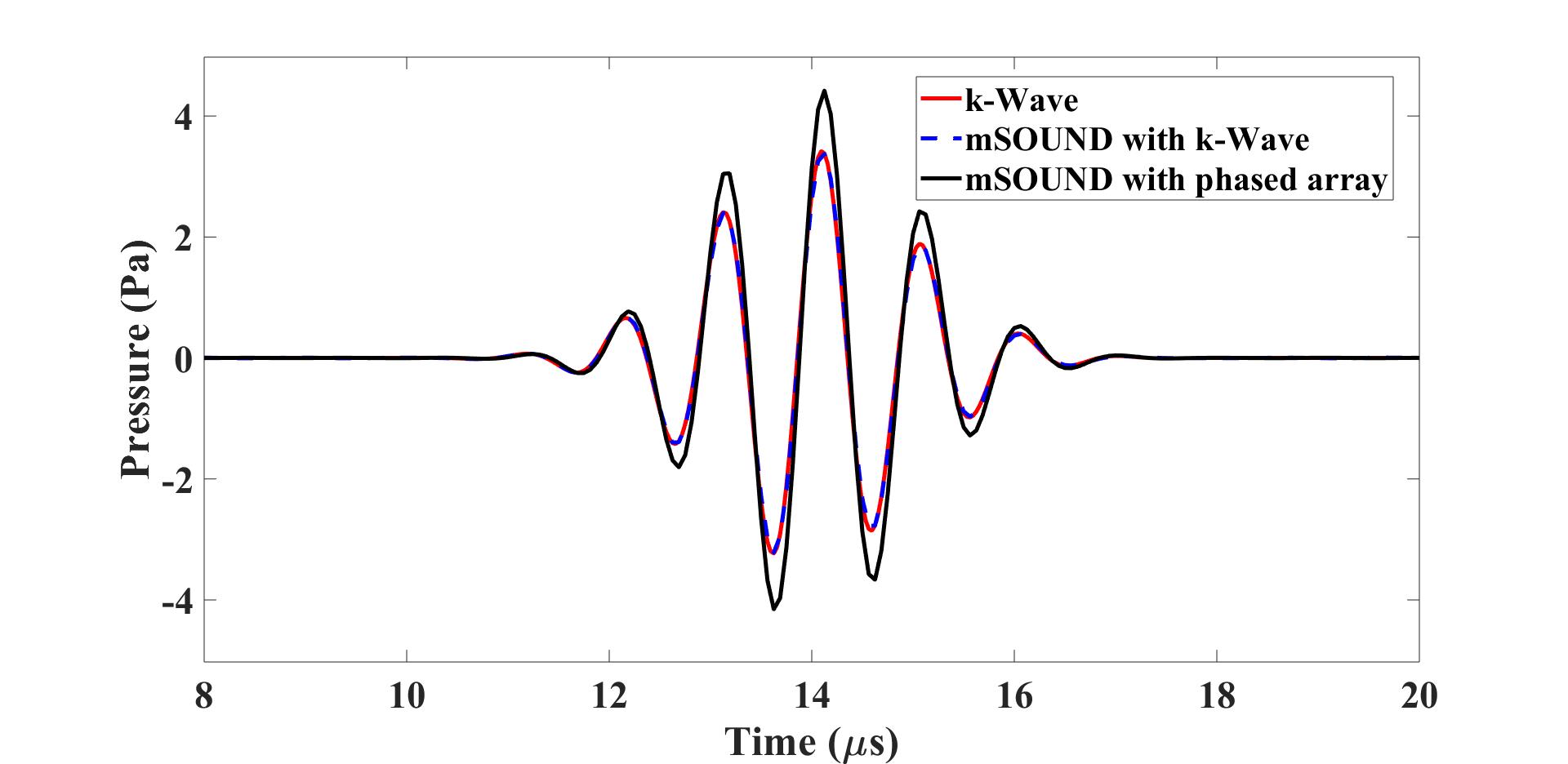
Forward simulation with TMDM
The figure below shows the waveform at the geometrical focus of the transducer. The result generated with mSOUND is compared with the result directly simulated with k-Wave and excellent agreement can be seen. The result generated with mSOUND using a phased array is also compared in this figure.
% define sensor mask in mSOUND
sensor_mask = zeros(mgrid.num_x, mgrid.num_y+1);
sensor_mask(:, end) = 1;
% 2D forward simulation with mSOUND
reflection_order = 0;
p_time = Forward2D(mgrid, medium, source_p, sensor_mask, reflection_order);
Other examples
·
Simulation of a 2D homogeneous medium using the transient mixed domain method
·
Simulation of a 2D heterogeneous medium using the transient mixed domain method
·
Simulation of a strongly 2D heterogeneous medium using the transient mixed domain method
·
Simulation of a 3D homogeneous medium using the transient mixed domain method
·
Selecting the proper temporal domain size for the TMDM
·
Shock wave simulations with TMDM
·
Simulation of a 2D homogeneous medium using the frequency-specific mixed domain method
·
Simulation of a 2D heterogeneous medium using the frequency-specific mixed domain method
·
Simulation of a 3D homogeneous medium using the frequency-specific mixed domain method
·
Simulation of a 3D heterogeneous medium using the frequency-specific mixed domain method
·
Reducing the spatial aliasing error using the non-reflecting layer
·
Comparing pressure release and rigid boundary conditions
·
Image reconstruction using backward projection
·
Reconstruction of the source pressure distribution with FSMDM in a 3D homogeneous medium
·
Integrating mSOUND with k-Wave for transducers of arbitrary shape
·
Integrating mSOUND with FOCUS for transducers of arbitrary shape
·
Integrating mSOUND with k-Wave for thermal simulations